北斗GPS教学平台/卫星导航实验平台高校实验室使用刚体陀螺演示仪



- 服务详情
刚 体 陀 螺 仪

陀螺仪(gyroscope)的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。
在现实生活中,陀螺仪发生的进动是在重力力矩的作用下发生的。
结构
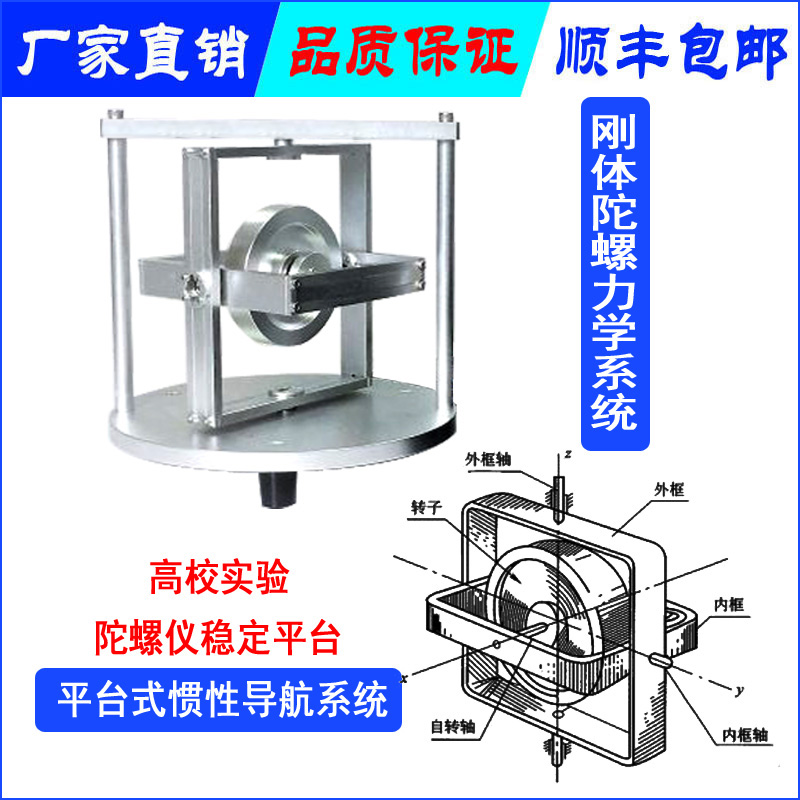
从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动。更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。
陀螺仪的基本部件有:
(1) 陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);
(2) 内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);
(3) 附件(是指力矩马达、信号传感器等)。
实验原理
陀螺仪被用在飞机飞行仪表的心脏地位,是由于它的两个基本特性:一为定轴性(inertia or rigidity),另一是进动性(precession),这两种特性都是建立在角动量守恒的原则下。
1、定轴性
当陀螺转子以极高速度旋转时,就产生了惯性,这惯性使得陀螺转子的旋转轴保持在空间,指向一个固定的方向,同时反抗任何改变转子轴向的力量,这种物理现象称为陀螺仪的定轴性或惯性。 其惯性随以下的物理量而改变:
1)转子质量愈大,惯性愈大;
2)转子旋转半径愈大,惯性愈大;
3)转子旋转速度愈大,惯性愈大;
2、进动性
在运转中的陀螺仪,如果外界施一作用或力矩在转子旋转轴上,则旋转轴并不沿施力方向运动,而是顺着转子旋转向前90度垂直施力方向运动,此现象即是进动性。
进动性的大小也有三个影响的因素:
1)外界作用力愈大,其进动性也愈大;
2)转子的质量惯性矩(moment of inertia)愈大,进动性愈小;
3)转子的角速度愈大,进动性愈小;
而进动方向可根据进动性原理取决于施力方向及转子旋转方向。
实验目的
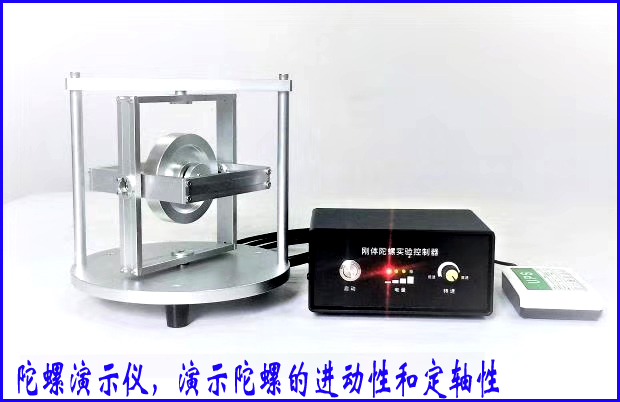
直观地演示旋转刚体(陀螺)的定轴性,和在外力作用下的进动性。
实验仪器
1. 刚体陀螺仪。
2. 仪器尺寸:230*230*230mm
3. 重量:2.6Kg
4. 电源220V/50Hz,输出电压9V,电流500MA
5.电机:直流有刷电机。
6.转速:0-5000转/分钟,可调
实验步骤
将刚体陀螺仪器平放在桌面上,仪器周转保留一定空间。
1、接通电源,打开开关。
2、缓幔调节电源输出电压,可见陀螺开始平稳转动,无异常振动杂音。
3、调电压至最大值,约12V;待转速稳定后,即可观察陀螺转动特性。
4、当陀螺高速旋转起来时,将陀螺拿起,观察陀螺转轴的角度变化,验证定轴性实验。
5、给陀螺仪外框施加一个力,观察内框的转动;给陀螺仪内框施加一个力,观察外框的转动。验证进动性实验。
注意事项
1、陀螺飞轮高速旋转时,不可用手触摸或试图阻止其转动。
2、仪器处于高速旋状态下,须有人




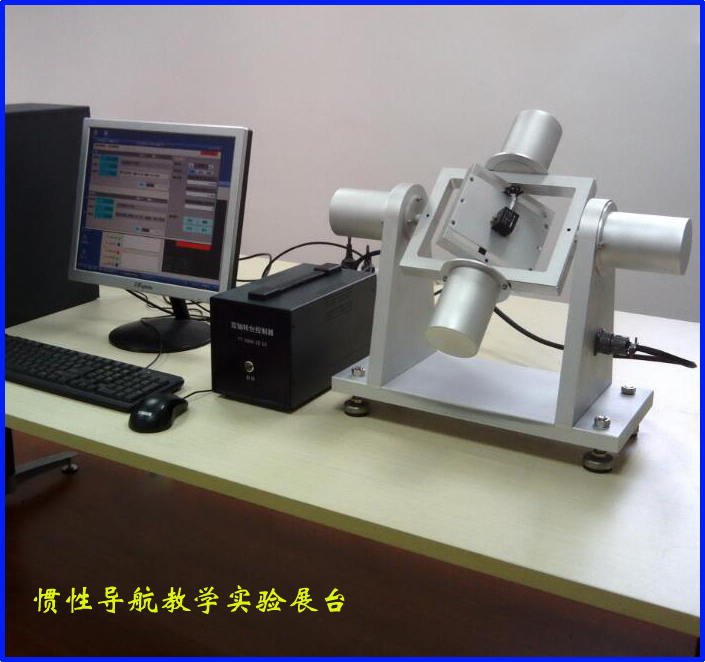
一、功能描述
北斗/GPS综合实验平台,由实验平台的硬件和上位机软件两部分构成,硬件部分可以完全独立工作。硬件部分主要由GPS/北斗有源全向天线,GPRS天线,显示解算信息的LCD触摸屏,惯导组件;上位机软件部分,能够进行数据采集,进行开源实验,循序渐进的实验步骤和简单易懂的可视化操作。
北斗/GPS综合实验平台,为学生提供开放式的实验环境,使学生在真实设备、真实卫星信号环境下,亲自动手进行实验和编程,理解单向测距原理,掌握GPS测量误差和信号传输误差特性,掌握实时GPS卫星轨道计算方法,理解DOP的物理意义、掌握其计算方法及应用特性,掌握GPS卫星位置及Doppler频移的预测方法等接收机核心技术,理解惯导器件组成,以及工作原理和特性,同时与卫星导航定位进行组合定位的意义,掌握GPRS的工作原理,理解无线通讯在未来物联网等领域应用的实际意义。
通过实验,使学生加深对GNSS、惯导、GPRS系统结构、工作原理、工作过程的理解,掌握GNSS接收机核心算法和导航解算过程。提供开源代码程序,让学生更深入的理解和掌握卫星导航算法中的精髓,同时也是为一些二次开发提供了算法支持。
二、适用范围
适合大中专院校,导航、通信、测绘等专业的本科生、研究生。北斗/GPS基础教学实验、本科生毕业设计、硕士生课题研究。专业研发卫星导航的科研人员也能快速入门。
三、系统组成及各部分主要作用
|
部件名称 |
描述 |
|
GPS L1/BDS B1有源全向天线 |
用于接收实时GPS/BDS卫星信号。 |
|
GPRS天线 |
接收GPRS无线信号 |
|
信息显示液晶触摸屏 |
用于实时显示当前的GPS/BDS卫星系统的定位信息,UTC时间信息,DOP值,惯导组件的动态姿态信息。 |
|
惯导组件 |
通过手来摇动组件,实时显示姿态的三维变化。 |
|
GPRS模块 |
用于接收GPRS信号,并且来实现短信及上网服务等功能。 |
|
GPS/BDS基带设备 |
用于对GPS/BDS卫星信号进行实时基带信号处理,为导航解算做前序准备工作。 |
|
上位机软件 |
提供八个循序渐进的实验,卫星轨道计算软件;电离层、大气层、相对论误差计算软件;定位精度因子计算软件;可视卫星预测软件;接收机位置、速度、时间解算软件;惯导姿态测量软件;GPRS信息发送和接收,以及上网服务软件。 |
|
开源实验程序 |
更深入的了解卫星导航设备的系统构成,熟悉导航终端的内部算法,同时结合惯导和无线通信网络,拓展应用思路。 |
|
实验内容 |
实验一:空间卫星观测;
实验三:实时卫星坐标计算; 实验五:定位精度因子DOP值; 实验六:电离层、对流层、时钟误差计算; 实验七:INS载体姿态测量; 实验八:GSM实验
|
四、配置一个卫星导航实验室需要基本设备:
|
序号 |
实验室配置设备 |
型号 |
数量 |
备注 |
|
1 |
GPS/北斗综合实验平台实验箱 |
BGE2200A |
8-10台 |
基础配置 |
|
2 |
卫星信号转接器
|
WD100 |
1-2台 |
基础配置 |
|
3 |
多通道GPS信号模拟器 |
5000A |
1 |
2、3选一 |
|
4 |
高精度卫星接收机 |
SS600 |
1 |
研发类 |
|
5 |
RTK基准站 |
MS650 |
1 |
研发类 |
|
6 |
双天线侧向标定系统 |
SS317 |
1 |
研发类 |
|
7 |
GNSS/INS 组合导航接收机 |
ZH2000 |
1 |
研发类 |
|
8 |
惯性测量单元 |
IMU200 |
1 |
研发类 |
|
9 |
ARM9开发板卫星导航开发板 |
WDK600 |
8-10个 |
研发类 |
|
10 |
GNSS高精度卫星接收机开发板 | WDK500 | 1-2个 | 基础配置 |
说明:序号 1、2为基础配置,其它为选项配置
Experience
33333
Advantages
5555
Shipping
hhhh
Payment
jjj