多功能刚体陀螺进动演示仪用于高校教学演示陀螺的定轴性和进动性
- 服务详情
多功能刚体陀螺进动演示仪/多功能演示仪
型号:HY-GT300 型
一、多功能刚体进动演示仪概述:
多功能刚体进动演示仪它可以演示刚体运动、定向陀螺、单轨车行进、航空航海及体育运动中的各种运动状态。不但验证了有关定理定律,而且富有启发性、科学性及趣味性。该仪器适用于大学、中学、中专、职专及航空、航海、体育、部队院校中物理,力学,流体等课程的演示教学和科研基础装置。
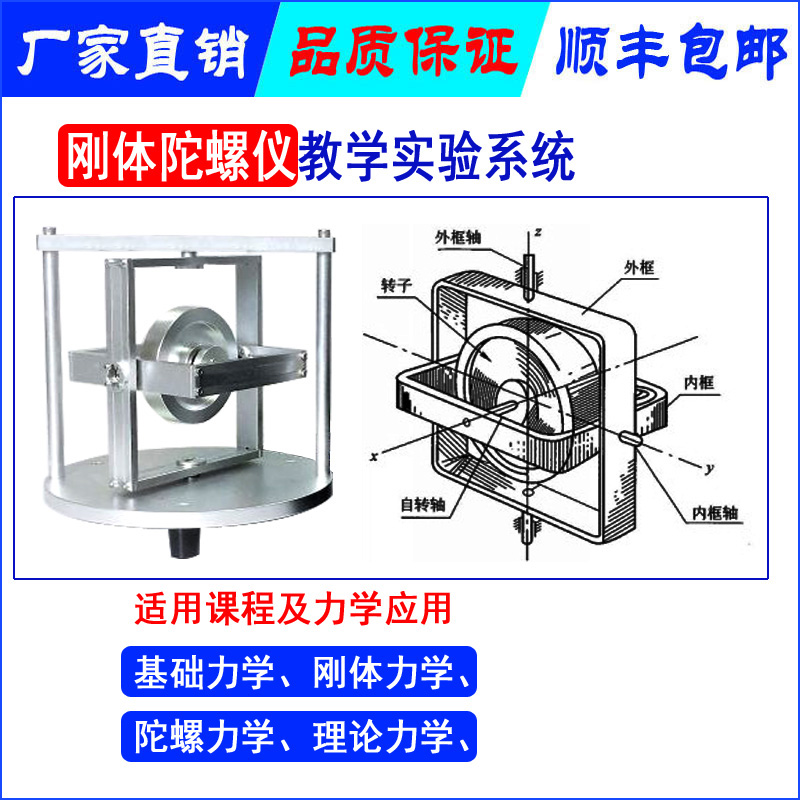
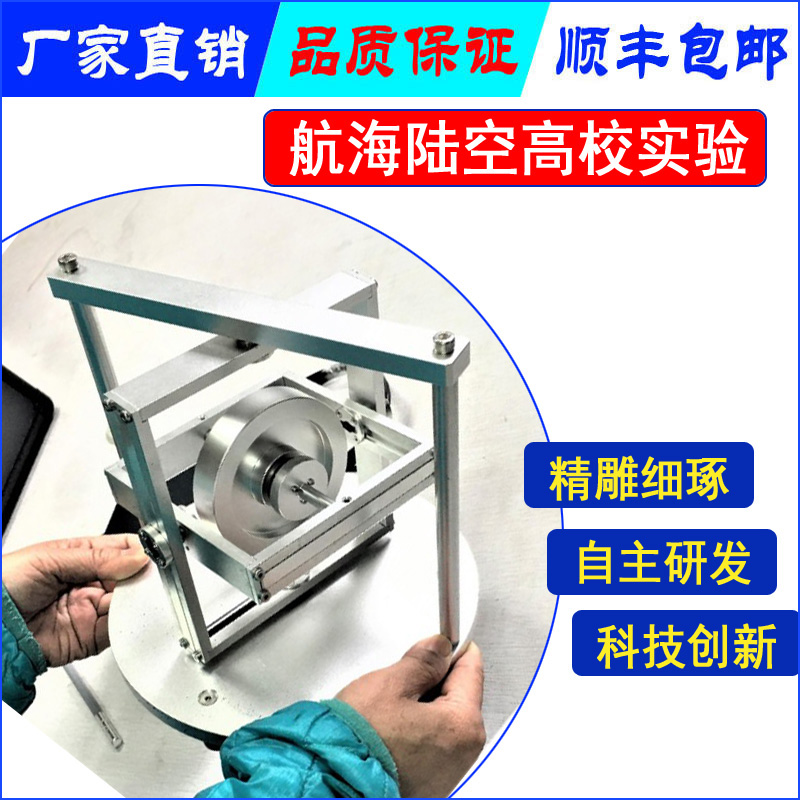
二、多功能刚体进动演示仪仪器结构:
从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个**度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动。更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的**度,这种装置的总体叫做陀螺仪。仪器由加速电机(8000r.p.m)高速旋转体、陀螺仪、支架、转盘、曲线导轨及附件组成,根据所需实验可单独组合。
三、陀螺仪的基本部件有:
1) 陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);
2) 内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动**度的结构);
3) 附件(是指力矩马达、信号传感器、控制器等)。
四、 实验原理
陀螺仪被用在飞机飞行仪表的心脏地位,是由于它的两个基本特性:一为定轴性(inertia or rigidity),另一是进动性(precession),这两种特性都是建立在角动量守恒的原则下。
4.1 定轴性
当三**度陀螺转子高速旋转后,若不受外力矩的作用,不管基座如何转动,支撑在万向支架上的 陀螺仪自转轴指向惯性空间的方位不变,这种特性叫“定轴性”。如果我们以地球为基准,则可以认为三**度陀螺相对于地球运动,这种运动称为陀螺的假视运动或视在运动。视在运动是陀螺稳定性的表现。
其惯性随以下的物理量而改变:
1)转子质量愈大,转动惯量I愈大;
2)转子旋转半径愈大,转动惯量I愈大;
3)转子旋转速度愈高,转动惯量I愈大;
4.2 进动性
在运转中的陀螺仪,如果外界施一作用或力矩在转子旋转轴上,则旋转轴并不沿施力方向运动,而是顺着转子旋转向前90度垂直施力方向运动,此现象即是进动性。
进动性的大小也有三个影响的因素:
1)外界作用力愈大,其进动性也愈大;
2)转子的质量惯性矩(moment of inertia)愈大,进动性愈小;
3)转子的角速度愈大,进动性愈小;
而进动方向可根据进动性原理取决于施力方向及转子旋转方向
五、 实验系统性能
1)刚体陀螺仪
尺寸:200*200*200mm
重量: 1.6Kg
2)转子电机:直流无刷电机(双电机结构);
3)电机转速:0~6000r/min(可调);
4)电源
电压:DC +12V
电流:3A
六、 实验系统特点
1)采用三**度刚体陀螺结构,可进行完善的陀螺实验及演示;
2)转子电机采用高速无刷电机,转速平稳,寿命长;
3)转子采用双电机结构,保障了转子的对称性,并加大了转子驱动力矩,启动速度快;
4)配置有专用控制器,可以完成转子转速控制,方便实验;
七、实验操作
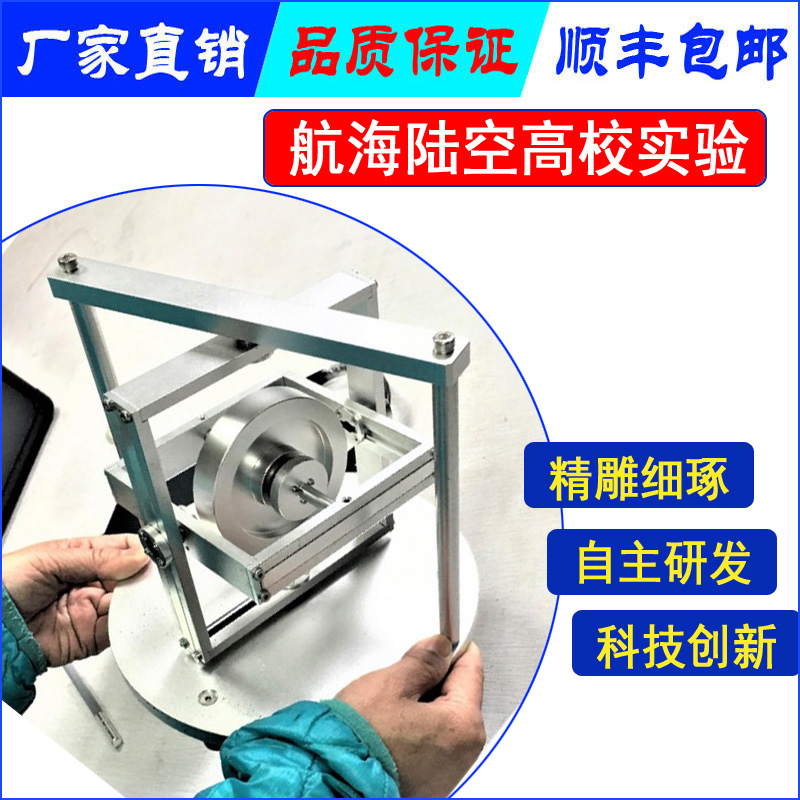
将刚体陀螺仪器平放在桌面上,仪器周转保留一定空间。
1)接通电源,打开开关;
2)设置转子转速:大、中、小;
3)启动陀螺,观察陀螺转子转速是否已经稳定;
4)定轴性实验
当三**度陀螺转子高速旋转后,若不受外力矩的作用,不管基座如何转动,支撑在万向支架上的陀螺仪自转轴指向惯性空间的方位不变,这种特性叫“定轴性”。
当陀螺转子高速旋转稳定后,手持基座分别绕刚体陀螺三个轴转动,观测刚体陀螺仪转子轴的指向的变化。
分别改变转子转速大中小,观测陀螺转子轴的变化。
5)进动性实验
进动性是三**度陀螺仪的一个基本特性。陀螺仪绕着与外力矩矢量相垂直的方向的转动,叫做进动,其转动角速度叫做进动角速度。
进动角速度的方向取决于转子动量矩H和外力矩M的方向。外加力矩沿陀螺自转方向转动90°即为进动角速度( )矢量方向。或者用右手定则记忆:从动量矩H沿*短路径握向外力矩M的右手旋进方向,即为进动角速度方向。
通过控制器可改变转子飞轮正反转、转速,从而控制动量矩H的方向和大小,通过内框两侧不同一侧加挂已知重量砝码,改变外力矩M的大小和方向,动量矩H为转子转动惯量和转速的乘积,方向符合右手定则
八、多功能刚体进动演示仪实验:
1、 定向陀螺:将高速电动机接通电源(AC220V50HZ)脚踏开关放置地面。将陀螺拿起并把四个环置于一个平面,把旋转体轴放在电机上方支架较深槽内,使旋转体外圆与胶轮接触,用手把稳、脚踏开关,电机胶轮靠摩擦把旋转体带转约半分钟后,抬脚关闭电机,把陀螺拿开,即可进行演示。
2、 单轨车行进:将一独立的旋转体,用加速胶轮加速后把滑轮一端放在曲线导轨上端即可演示。
3、 转盘进动:将陀螺环架从底座上取下,把带轴承的圆盘放在底座上,转盘可灵活旋转,按上述方法把转体带转后,T型架放置于圆盘上并使重心偏置,旋转体在重力矩作用下带动转盘完成进动演示。
4、 陀螺进动:把转盘取下,将凹槽支撑体放在底座上,用上述方法把旋转体带转后,将滑轮头放在凹槽内即可演示。
5、 绕支撑轴进动:将带轴承的支撑架放在底座上,用上述方法把旋转体带转后,再把旋转体轴平放在凹槽上即可演示。
6、 飞机俯冲演示:手持旋转体,让其在铅垂平面内作大圆周运动,可明显感觉旋转体在作曲线运动时受偏右方向的力(假设旋转体顺时针旋转)致使旋转体偏向右方,说明“飞机”要完成铅垂平面内的“俯冲”动作应打“左舵”方能完成大圆周运动轨迹。
九、注意事项:
1、 旋转体转速达6000—8000r.p.m,实验中手避免与转体接触,注意安全。
2、 加速时可手持轴,避免振动过大。
3、 做进动实验完毕旋转的旋转体可放在电机盒上方支架较浅槽内,让其自行停止。
4、 加速电机尽量避免空载启动。
十、 适用课程
惯性传感器原理、惯性导航原理、导航制导与控制、飞行控制原理、无人机实训实验、基础力学、刚体力学、陀螺力学、理论力学、新型传感器原理及应用等。
合作院校:
北京航空航天大学 仪器科学与工程系先进导航实验室
北京信息科技大学 自动化学院 导航工程
桂林理工大学 自动化专业 导航工程
南开大学 自动化
哈尔滨工程大学 航空航天专业
上海工程技术大学 飞行控制专业
海军工程大学 航海技术专业
大连舰艇大学 航海工程技术
南京航空航天大学 自动化专业
北京信息科技大学 自动化专业
南京大学 通讯专业
同济大学 软件学院
东南大学 导航与制导