北斗/GPS卫星定位导航综合教学实验平台



- 服务详情
北斗/GPS卫星导航综合实验平台
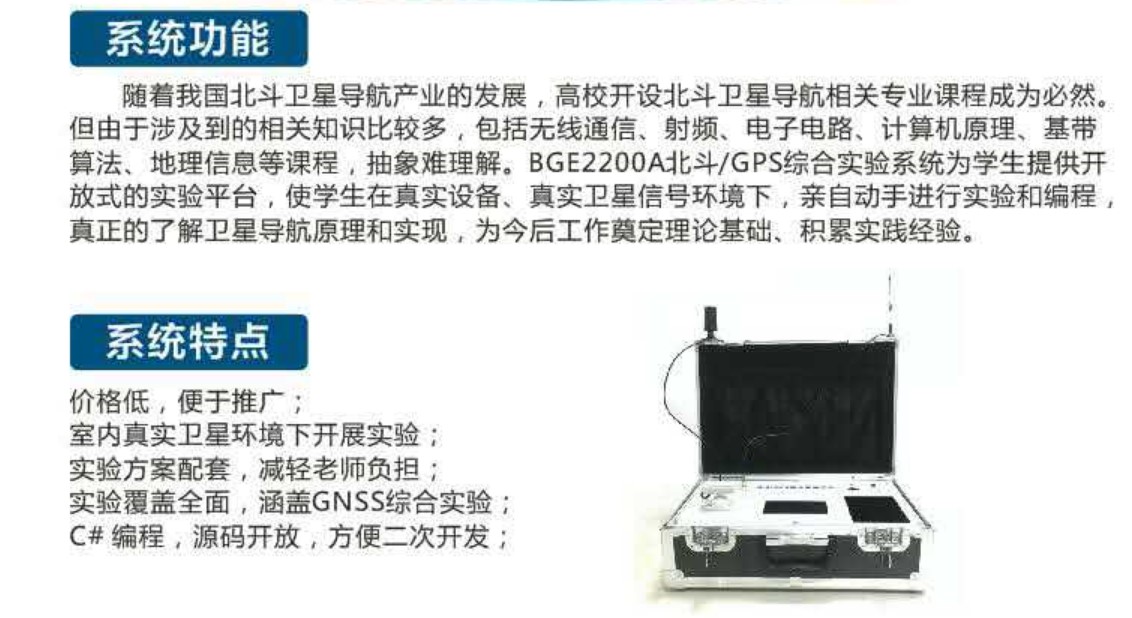
随着我国北斗卫星导航产业的发展,高校开设北斗卫星导航相关专业课程成为必然。但由于涉及到的相关知识比较多,北斗/GPS综合实验系统卫星导航定位、授时等基本功能,还设计了惯性测量给合及通讯等模块,包括无线通信、射频、电子电路、信息、计算机原理、测量测绘、自动控制、导航、遥控遥测、环境监测、交通运输、城市规划、物联网、基带算法、地理信息等课程专业的相关教学实验和实训使用。抽象难理解。BEG2200A北斗/GPS综合实验系统为学生提供开放式的实验平台,使学生在真实设备、真实卫星信号环境下,亲自进行实验和编程,真正的了解卫星导航原理和实现,为今后工作奠定理论基础、积累实践经验。
北斗/GPS综合实验平台
通过实验揭示GPS/北斗接收机内部核心技术
大中专院校实验室首选工具
一、功能描述
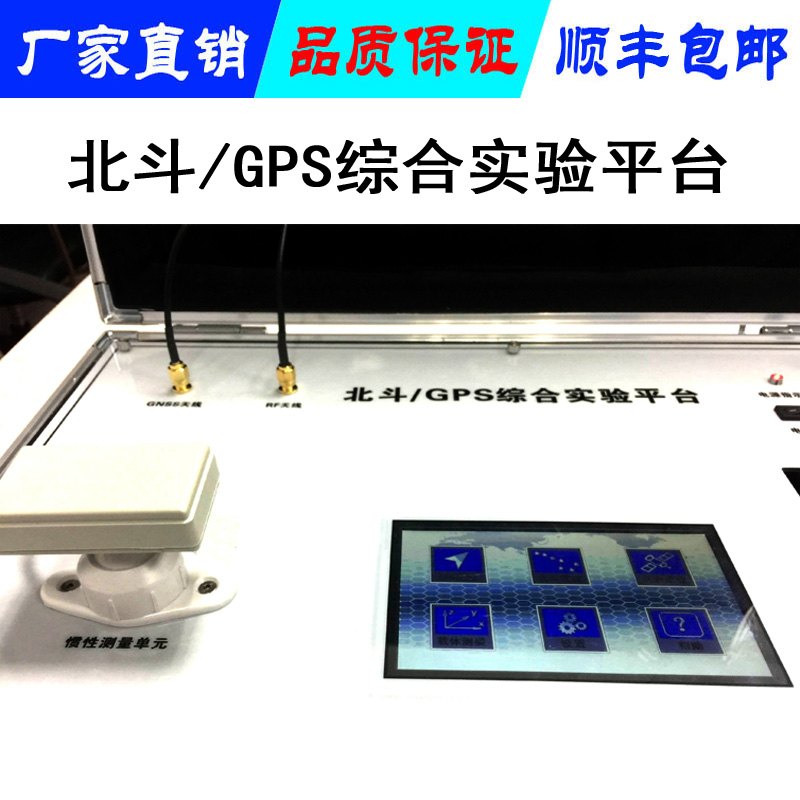
北斗/GPS综合实验平台,由实验平台的硬件和上位机软件两部分构成,硬件部分可以完全独立工作。硬件部分主要由GPS/北斗有源全向天线,GPRS天线,显示解算信息的LCD触摸屏,惯导组件;上位机软件部分,能够进行数据采集,进行开源实验,循序渐进的实验步骤和简单易懂的可视化操作。
BGE2200A北斗/GPS综合实验系统除卫星导航定位、授时等基本功能外,还设计了惯性测量组合及通讯等模块,适用于通信、电子、信息、计算机、测量测绘、自动控制、导航、遥控遥测、环境监测、交通运输、城市规划、物联网等专业的相关教学实验和实训使用。
BGE220A综合实验平台,为学生提供开放式的实验环境,使学生在真实设备、真实卫星信号环境下,亲自动手进行实验和编程,理解单向测距原理,掌握GPS测量误差和信号传输误差特性,掌握实时GPS卫星轨道计算方法,理解DOP的物理意义、掌握其计算方法及应用特性,掌握GPS卫星位置及Doppler频移的预测方法等接收机核心技术,理解惯导器件组成,以及工作原理和特性,同时与卫星导航定位进行组合定位的意义,掌握GPRS的工作原理,理解无线通讯在未来物联网等领域应用的实际意义。
通过实验,使学生加深对GNSS、惯导、GPRS系统结构、工作原理、工作过程的理解,掌握GNSS接收机核心算法和导航解算过程。提供开源代码程序,让学生更深入的理解和掌握卫星导航算法中的精髓,同时也是为一些二次开发提供了算法支持。




一、功能描述
北斗/GPS综合实验平台,由实验平台的硬件和上位机软件两部分构成,硬件部分可以完全独立工作。硬件部分主要由GPS/北斗有源全向天线,GPRS天线,显示解算信息的LCD触摸屏,惯导组件;上位机软件部分,能够进行数据采集,进行开源实验,循序渐进的实验步骤和简单易懂的可视化操作。
BGE2200A北斗/GPS综合实验系统除卫星导航定位、授时等基本功能外,还设计了惯性测量组合及通讯等模块,适用于通信、电子、信息、计算机、测量测绘、自动控制、导航、遥控遥测、环境监测、交通运输、城市规划、物联网等专业的相关教学实验和实训使用。
BGE220A综合实验平台,为学生提供开放式的实验环境,使学生在真实设备、真实卫星信号环境下,亲自动手进行实验和编程,理解单向测距原理,掌握GPS测量误差和信号传输误差特性,掌握实时GPS卫星轨道计算方法,理解DOP的物理意义、掌握其计算方法及应用特性,掌握GPS卫星位置及Doppler频移的预测方法等接收机核心技术,理解惯导器件组成,以及工作原理和特性,同时与卫星导航定位进行组合定位的意义,掌握GPRS的工作原理,理解无线通讯在未来物联网等领域应用的实际意义。
通过实验,使学生加深对GNSS、惯导、GPRS系统结构、工作原理、工作过程的理解,掌握GNSS接收机核心算法和导航解算过程。提供开源代码程序,让学生更深入的理解和掌握卫星导航算法中的精髓,同时也是为一些二次开发提供了算法支持
二、适用范围
适合大中专院校,导航、通信、测绘等专业的本科生、研究生。北斗/GPS基础教学实验、本科生毕业设计、硕士生课题研究。专业研发卫星导航的科研人员也能快速入门

三、系统组成及各部分主要作用
|
部件名称 |
描述 |
|
GPS L1/BDS B1有源全向天线 |
用于接收实时GPS/BDS卫星信号。 |
|
GPRS天线 |
接收GPRS无线信号 |
|
信息显示液晶触摸屏 |
用于实时显示当前的GPS/BDS卫星系统的定位信息,UTC时间信息,DOP值,惯导组件的动态姿态信息。 |
|
惯导组件 |
通过手来摇动组件,实时显示姿态的三维变化。 |
|
GPRS模块 |
用于接收GPRS信号,并且来实现短信及上网服务等功能。 |
|
GPS/BDS基带设备 |
用于对GPS/BDS卫星信号进行实时基带信号处理,为导航解算做前序准备工作。 |
|
上位机软件 |
提供八个循序渐进的实验,卫星轨道计算软件;电离层、大气层、相对论误差计算软件;定位精度因子计算软件;可视卫星预测软件;接收机位置、速度、时间解算软件;惯导姿态测量软件;GPRS信息发送和接收,以及上网服务软件。 |
|
开源实验程序 |
更深入的了解卫星导航设备的系统构成,熟悉导航终端的内部算法,同时结合惯导和无线通信网络,拓展应用思路。 |
|
实验内容 |
实验一:空间卫星观测;
实验三:实时卫星坐标计算; 实验五:定位精度因子DOP值; 实验六:电离层、对流层、时钟误差计算; 实验七:INS载体姿态测量; 实验八:GSM实验 |
四、配置一个功能完善的卫星导航实验室需要基本设备:
|
序号 |
实验室配置设备 |
型号 |
数量 |
备注 |
|
1 |
GPS/北斗综合实验平台实验箱 |
BGE2200A |
8-10台 |
基础配置 |
|
2 |
卫星信号转接器
|
WD100 |
1-2台 |
基础配置 |
|
3 |
多通道GPS信号模拟器 |
5000A |
1 |
2、3选一 |
|
4 |
高精度卫星接收机 |
SS600 |
1 |
研发类 |
|
5 |
RTK基准站 |
MS650 |
1 |
研发类 |
|
6 |
双天线侧向标定系统 |
SS317 |
1 |
研发类 |
|
7 |
GNSS/INS 组合导航开发板 |
ZHDK3000 |
1 |
研发类 |
|
8 |
惯性测量单元 |
IMU200 |
1 |
研发类 |
|
9 |
ARM9开发板卫星导航开发板 |
WDK600 |
8-10个 |
研发类 |
|
10 |
GNSS-RTK一键式基准站 |
MS800A-ED |
1个 |
基础配置 |
|
11 |
上门安装调试费培训 |
|
次 |
|
说明:序号 1、2为基础配置,其它为选项配置
五、实验室配置示意图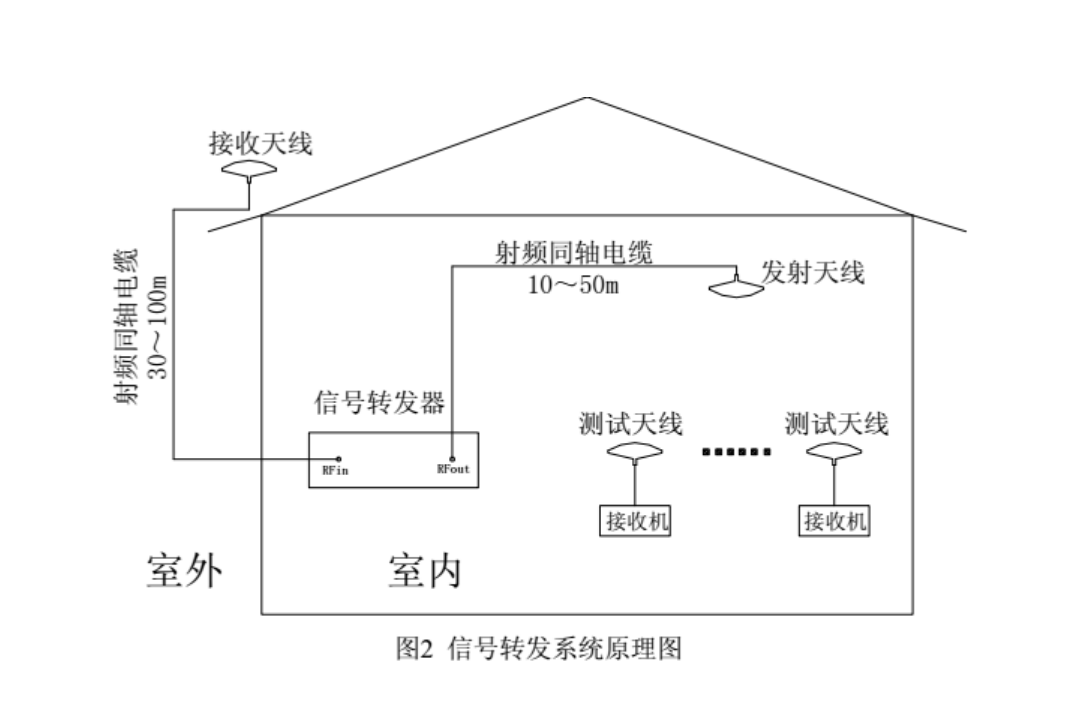


系统配置:
实验箱内置主要组件
◆ GNSS天线: 用于接收北斗/GPS卫星信号;
◆ GNSS接收板: 用于对GPS和北斗卫星信号进行实时基带信号处理,并提供相应的原始数据,为各种教学实验做准备;
◆ GPRS模块及天线: 用于提供 GSM 信息收发功能;
◆ 蓝牙模块: 用于和安卓平板电脑或手机通讯;
◆ 惯导组件: 用于提供惯性原始数据及载体姿态信息;
◆ 控制器: 用于通讯与协调等;
◆ 触摸显示屏: 用于实验功能切换、显示实验数据及结果等功能。.
外部配置组件
◆ 安卓平板电脑: 用于显示平台提供的解算结果,比如 GPS 定位,北斗定位结果,载体姿态测量结果等;
◆ 通用计算机系统: 用于实验平台软件运行,完成解算、显示、仿真等操作(选购);
◆ 433M无线电台: 用于接收发送差分信号和通讯;
◆ GNSS卫星信号转发器: 用于转发放大外部GNSS接收天线的卫星信号;
◆ GNSS卫星信号模拟器: 用于模拟卫星信号(选购);
◆ GNSS参考基准站: 用于提供RTCM2.3和RTCM3.0差分信号。
软件界面:C语言编写的北斗GPS软件应用界面
实验箱技术指标和参数:
1、GNSS天线:用于接收多模多频卫星信号;GPS L1/L2、GLONASS L1/L2、BDS B1/B2/B3
2、GNSS接收板卡:提供卫星基带信号处理、原始数据及标准语句等;
单点定位精度:1.5m (RMS);
SBAS精度:0.6m (RMS);
差分定位精度:0.02 m (RMS)
授时精度: 20ns
信号跟踪: 冷启动:<50s ;
温启动:<30s ; 热启动:<15s ;
信号重捕获 :<2s
GNSS差分定位≤0.02米
3、GPRS模块:提供 GSM 信息收发功能;
工作频率:GSM850M、EGSM900M、DCS1800M、PCS1900M,自动搜索
SIM卡接口:支持1.8/3V SIM卡
发射功率:2W(GSM850M、EGSM900M)1W(DCS1800M、PCS1900M)
内置天线
4、无线电台模块:接收差分数据;工作频率433M,发射功率1W,波特率9600bps,
5、蓝牙模块:连接平板电脑或移动设备,如手机等;
符合标准IEEE802.15,工作频率2.4GHz,带宽为1Mb/s。
6、惯导测量单元:提供惯性测量原始数据及载体姿态信息;
速率陀螺测量范围: ±2000°/sec
速率陀螺零偏稳定性:±0.2°/sec
加速度计测量范围:±2g
加速度计零偏稳定性:±0.003 (±2g)g
加速度计非线性:0.2 %
7、控制器:实验箱主控制测量设备;
32位Cortex-M3内核+高速FPGA
8、触摸显示屏:实验功能切换、显示实验数据及结果等;
5寸电容式触摸屏;
FPGA纯硬件读写刷屏;
16位真彩色RGB显示(64K);
9、电源及接口:
电源电压:12VDC
负载电流:<2A
其它配置设备(实验箱之外的配置)
1、高精度GNSS天线:用于接收多模多频卫星信号;
增益32dB
GPS L1/L2;GLONASS G1/G2;BEIDOU2 B1/B2/B3;GALILEO E1
2、GNSS卫星信号转发器:转发放大外部GNSS接收天线的卫星信号。
接收和发射频率:GPS :L1:1575.42±10MHz;L2: 1227.60±10MHz;
GLONASS:L1:1602±10MHz;BD2:B1:1561.098±10MHz;B2:1207.14 MHz±10MHz;B3: 1268.52
MHz±10MHz;
驻波:≤1.5:1
噪声系数:≤1.5dB
接收电路增益:32±2dB
发射电路增益:26±2dB
极化方式:右旋圆极化
电压:12VDC
电流:≤100mA
电缆线长度:30M(可变)
3、GNSS参考基准站:向实验箱提供差分信号,配合高精度定位实验。
信号跟踪:120通道,GPS L1C/A码L1/L2 P码, BDS B1/B2 I支路C码 GLONASS L1;SBAS:
WAAS,EGNOS,MSAS;Galileo可选
精度指标(GNSS):定位精度:水平:±(2.5 +1×10-6×D)mm,垂直:±(5 + 1×10-
6×D)mm
RTK初始化:时间<10s ,初始化可靠性 > 99.9%
冷启动:<50s ; 温启动:<30s ; 热启动:<15s ;信号重捕获 :<2s
数据格式:CMR/CMR+,RTCM2.3,RTCM3.x 等;
射频接口:TNC
电源电压:12V
通讯接口:RS232(可转接标准以太网)
数据更新率:差分数据输出:1Hz
4、安卓平板电脑:显示测量数据、实验界面及解算结果等。
5、通用计算机系统:用于实验平台软件运行,完成。
基本实验:实验一 空间卫星观测
实验二 北斗/GPS数据采集与解析
实验三 实时卫星坐标计算
实验四 接收机高精度定位和测速
实验五 定位精度因子 DOP 值
实验六 电离层、对流层、时钟误差计算
实验七 载体惯性姿态测量
实验八 GSM 实验
扩展实验:
实验一 计算北斗/GPS卫星三维位置
实验二 计算卫星信号多普勒频率
实验三 计算卫星信号经过电离层/大气层产生的延时误差
实验四 计算导航定位几何精度因子
实验五 预测可视卫星在轨道上的位置和多普勒频移
实验六 计算接收机ECEF坐标系内的位置、时间
实验七 ECEF坐标系与WGS84坐标系坐标变换编程实验
实验八 UTC时间与本地时间变换编程实验
增强实验:
实验一 计算机平台应用程序开发实验
实验二 安卓平台APP开发实验
实验三 通信模块应用实验(无线电台/GPRS)
实验四 差分站通信及差分信息获取实验
实验五 高精度RTK定位实验
实验六 GNSS-INS组合导航基础实验
实验七 定位结果分析与比较实验